传感器
目录
返回顶部
Machinechat
主要特性
软件选择
通信协议
内部集成电路(I²C 总线)
改进型内部集成电路(I3C)
串行外设接口(SPI)
通用异步收/发器 (UART)
比较 UART、SPI、I²C 和 (I3C)
通信生态系统
SparkFun QWiiC 连接
Adafruit STEMMA QT 连接
Seeed Grove
环境传感器
温度传感器
湿度、湿敏传感器
压力传感器
气体传感器
方向和存在传感器
运动传感器
光学传感器
接近传感器
产品
传感器
传感器(或变送器)是电子系统中“感知”外界的部分。就像动物用它们的感官(视觉、嗅觉、触觉、听觉和味觉)在世界中导航一样,电子产品也同样利用传感器来感知世界。
包括小型化、更密集的集成、更强大的连接能力和复杂的数据处理能力在内,传感器技术的进步正在颠覆现有的工业和消费应用。请阅读《传感器》电子杂志,更多地了解如 3D 飞行时间传感器、空气质量智能传感器以及使用 MEMS 传感器进行振动监测等主题内容。
 DigiKey 电子杂志—2024 传感器专刊。
DigiKey 电子杂志—2024 传感器专刊。
Machinechat
MachineChat 是一家开发一体化软件应用(如 JEDI One 和 JEDI Pro)的公司,其产品可用于数据收集、仪表盘可视化和基于规则的监控。软件只需几分钟即可在台式机和单板计算机上运行,且无需另行编码。软件在本地系统中运行,无需将数据发送到云端,无需支付使用费。

主要特性
- 数据采集源包括 MQTT、REST API、HTTP、TCP CSV、串行/USB。此外,还有通过定制数据收集器的其他数据收集源。
- 该软件可对传感器数据进行过滤、转换、汇总、监控和操作。
- 数据存储在本地,保存在 CSV 数据库中。
- 进行数据缓存并向上游服务发送数据,如 MQTT 和 REST API。
- 所有数据可视化都可通过网络界面实现。
- 警报可通过电子邮件或短消息 (SMS) 发出。
- 软件可在 PC、Mac、Linux、Raspberry Pi 和 BeagleBone 设备上运行。
软件选择
- JEDI One 面向创客和早期原型开发(单用户,最多 10 台设备)
- JEDI Pro 适用于商业应用(最多 10 名用户,最多 200 台设备)
 以 TechForum 上的一篇关于 MachineChat 的文章中的仪表板为例,其中有 30 多篇文章都深入介绍了如何使用各种平台和传感器:TechForum 上的 MachineChat 分类
以 TechForum 上的一篇关于 MachineChat 的文章中的仪表板为例,其中有 30 多篇文章都深入介绍了如何使用各种平台和传感器:TechForum 上的 MachineChat 分类
用树莓派、PyPortal Titano和machinechat JEDI One设置和测试MQTT broker服务器
描述 该项目使用machinechat的JEDI One物联网数据管理软件在树莓派4上设置了一个物联网MQTT broker 服务器。JEDI One包括一个数据收集器,可以将其配置为MQTT broker 服务器,外部客户机设备可以向其发布和(或)订阅JEDI One上的主题。

使用Advantech WISE-4610 I/O模块将RS-485传感器添加到您的专用TTN LoRaWAN网络
这篇文章建立在早期的文章Advantech 工业级 LoRaWAN 无线输入/输出模块 WISE-4610 入门和详细使用WISE-4610的RS-485通信能力连接Modbus RS-485传感器和发送Modbus命令读取传感器。

使用 Machinechat 和 MQTT 设置一个 Wio Terminal 作为远程室外空气质量监测显示器
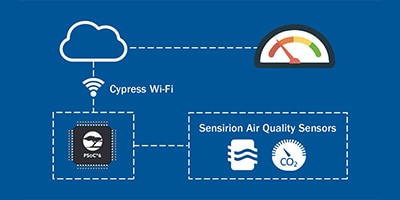
该项目设置了一个Seeed Wio Terminal,作为远程室外空气质量显示器,显示臭氧(O3)和颗粒物(PM2.5和PM10)数据。


为 Renesas ZMOD4510 室外空气质量传感器,配备 Machinechat
本项目设置Arduino MKRWIFI1010板,从Renesas ZMOD4510传感器读取臭氧(O3)和相关的空气质量指数(AQI).

使用 Machinechat 的 JEDI One 和 Raspberry Pi 构建通用传感器中枢
了解如何构建基本的通用传感器中枢并融合专业化的数据监控和可视化功能,而无需花费数天或数周的时间进行编码。
通信协议
并行和串行通信有何区别? 查看解答
并行通信同时发送多个比特的数据,需要数据总线硬件,通常由多根导线组成。并行通信虽然可以加快数据传输,但需要所连接的设备提供更多的 I/O 端口,还需要复杂的接线布局。

串行通信每次只需通过一根导线在配对设备之间发送单比特数据。由于设备通信只使用一个 I/O 端口,因此可降低设备的整体复杂性并节省成本。
 来源:
来源:同步通信和异步通信有何区别? 查看解答
根据是否使用时钟信号来控制所链接设备之间的数据通信并使其同步,串行通信可进一步分两个子类:同步通信和异步通信。
- 异步(或 Async)串行是指无需时钟信号即可传输数据。在没有时钟信号的情况下,设备之间传输的数据必须使用起始位和终止位进行编码,以确保正确传输;虽然速度通常较慢,但在诸如数据缓冲等不需要实时响应的应用中,没有时钟信号也是有用的。
- 同步(或 sync)串行要求所有设备共享一个时钟信号,以控制数据通信。虽然同步串行需要在所有设备上使用另一个定时信号,但它确实能加快通信速度。
单工、半双工和全双工之间有何区别? 查看解答

这几个概念与设备之间的数据流向有关。数据流主要有三种描述方法:
- 单工 - 数据从数据源到目标设备是单向流动。例如,收音机从无线电塔接收广播电台信号。信号从发射塔发射,由收音机接收。
- 半双工 - 配对设备之间可以进行双向数据传输,但在一定时间内只能进行单向传输。为了实现半双工,两台设备都必须能够传输和接收数据。例如,对讲机就是半双工设备,因为每次通信只能有一个设备发射,另一个设备接收。
- 全双工 - 两个设备可同时在两个方向传输和接收数据。这就形成了双向通信。例如,电话连接就是双向通信,因为两个设备需要同时发送和接受数据。

内部集成电路(I²C 总线)
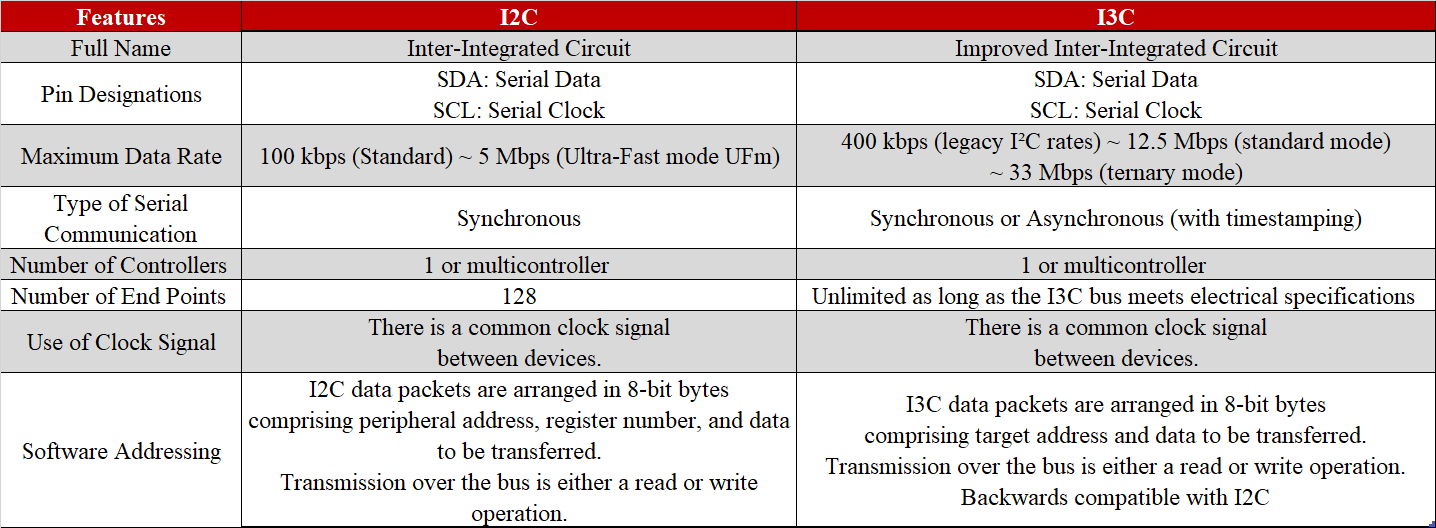
- 内部集成电路 (I²C) 协议是一种双线串行连接,旨在让多个终端与一个或多个控制器进行通信。这是一种半双工协议,即每次传输数据时,只能从控制器将数据单向发送到多个终端。
- I²C 的数据传输速度在 0.1 Mbit/s 至 5 Mbit/s 之间,具体取决于具体的 IC 和总线配置。不过,由于双线总线连接简单,其数据传输速率可能比更复杂的 SPI 连接慢得多。
改进型内部集成电路(I3C)
- 改进型集成电路间 (I3C) 协议是一种双线串行连接,旨在让多个端点与一个或多个控制器进行通信。该协议与 I²C 有许多共同点(包括半双工)。
- 与 I²C 标准相比,I3C 标准的一大改进是定义了一种信号发送协议,即允许同一总线上的多个芯片控制总线通信,而且功耗更低,数据传输速率更高。
- (I3C) 总线的数据传输速率从传统 I²C 的 400Kbit/s 到三元模式下的 33 Mbit/s,但常用的标准数据传输速率 (SDR) 为 12.5 Mbit/s。
串行外设接口(SPI)
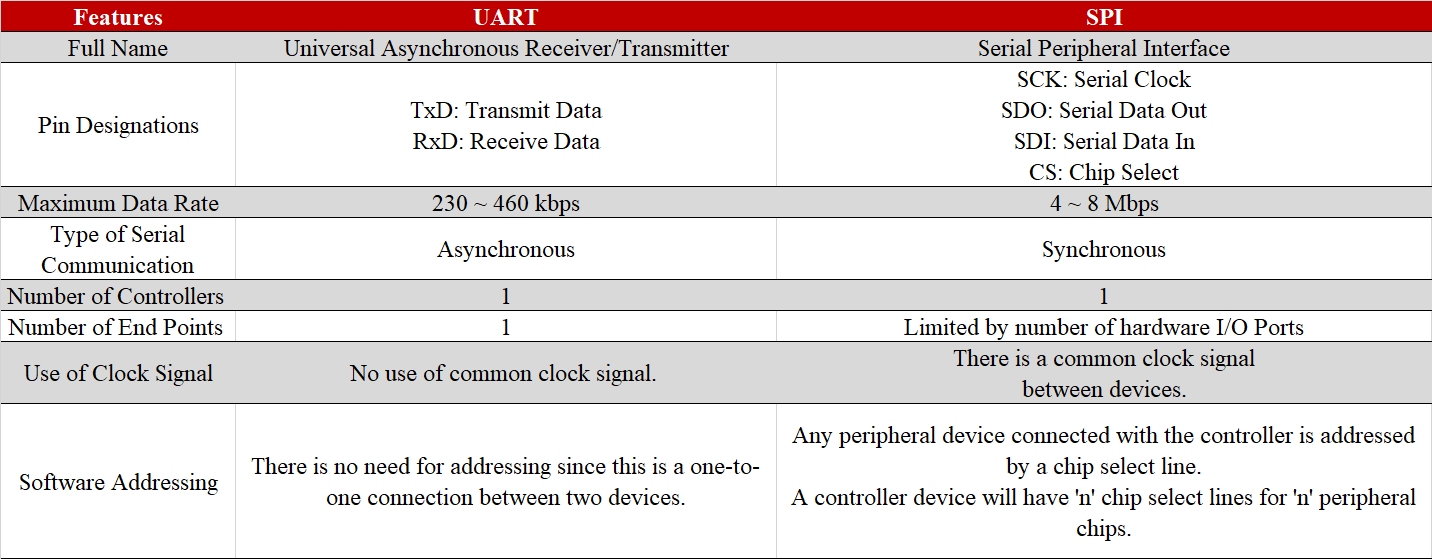
- 串行外设接口 (SPI) 协议是一种 3 线或多线总线连接,允许许多不同的端点与一个中央控制器 IC 进行通信。
- 作为一种全双工同步串行连接,SPI 连接需要一个来自中央控制器的同步时钟信号,且 SPI 网络上的所有参与者共享该时钟信号,从而实现更快速的双向数据传输。当信号源和接收器 IC 彼此靠近时,例如在同一电路板上,传输速度可高达 60 Mbps。
- SPI 的缺点是,当在同一总线上添加更多端点时,需要更多可用的 I/O 引脚作为芯片选择引脚,还需要与控制器 IC 进行更多的有线连接,这会造成现有网络的扩展困难。
通用异步收/发器 (UART)
- 通用异步接收器-发送器 (UART) 是一种双向异步串行连接,通常通过硬件实现,可设置为单工、半双工或全双工数据传输,数据以单比特形式按从最小到最大的顺序依次发送。
- 在没有共享时钟信号来控制数据定时和发送的情况下,UART 依靠 UART 数据帧的起始位和终止位来发出何时开始传输、停止传输的信号。
- 与现代网络方法相比,UART 的数据传输速度通常较慢,而且通常以 1 对 1 的通信方式连接,且如采样率、流量控制、数据帧大小和电压电平等所有数据传输变量都需要在连接前达成一致。
- 大多数现代微控制器设备通常都有多套 UART 电路,因此能通过多个 UART 连接为多个设备实现通信功能。
比较 UART、SPI、I²C 和 (I3C)
 UART 和 SPI 通信协议比较
UART 和 SPI 通信协议比较
 I²C 和 (I3C) 通信协议比较
I²C 和 (I3C) 通信协议比较



涨知识 | 长距有线通信,为什么要用RS-485?
RS-485 (或称 TIA-485(-A), EIA-485) 广泛应用于有线通讯,是作两线通讯, 数据传输可达10Mbps,其最大优势是使用平衡线 (balanced line) 作差分(differential) 运作。

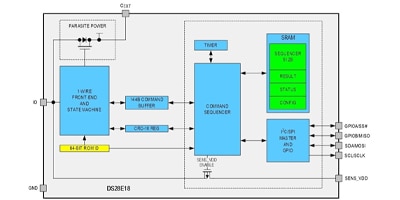
如何使用 1-Wire 通信有效地连接物联网端点的传感器
使用 Maxim Integrated 的 1-Wire 协议桥接控制器,开发人员可以将电源和数据传输到 100 m 以外的 SPI 和 I2C 外设。

通信生态系统
这些连接器使原型设计更加快速、简便,且可以在更短的时间内获得包括传感器在内的解决方案,而且不需要焊接。
SparkFun QWiiC 连接
- 无需焊接即可连接 I²C 设备的快速系统
- 连接更容易,可避免数据线和时钟线接反
- 父设备可通过菊花链连接 100 多个子设备
- 只有 3.3 V 信号
- 非标准电路板尺寸
 SparkFun QWiiC 连接生态系统示例
SparkFun QWiiC 连接生态系统示例Adafruit STEMMA QT 连接
- 使用插头标准的快速原型开发系统可取消或减少布线和焊接时间
- 兼容型传感器平台具有 3.3V 和 5V 电压电平转换功能
- I²C 通信
- 与 Sparkfun QWiiC 兼容
- 与 Seeed Grove 兼容(通过适配器)
 带有两个 STEMMA QT 插座的 Adafruit 传感器
带有两个 STEMMA QT 插座的 Adafruit 传感器Seeed Grove
- 能够以即插即用的方式添加外设/模块
- 兼容 Arduino、NodeMCU 和 Raspberry Pi 等多种微控制器平台
- 一组用于传感器模块/电路板的固定电路板尺寸
- 4 针位连接器和 4 芯电缆
- 可通过模拟、I²C 和 UART 方式通信
- Grove 扩展板可在开发板顶部堆叠,以提供一组易于使用的连接器
 基于 Grove 的 Arduino 扩展板
基于 Grove 的 Arduino 扩展板

Seeeduino Lotus Grove 入门套件 常见问题
Digi-Key 得捷电子联合 SEEED 硅递科技近期一同推出了一系列创意开发套件, 为创客及工程师们带来了不一样的开发体验。

使用 Seeed 的 LoRa-E 5模块, 为 LoRaWAN 网络开发风速/风向传感器
该项目涵盖了开发基于Seeed LoRa-E5的Arduino风速/方向传感器的过程,并将其安装在能够连接到DigiKey公司总部大楼屋顶气象平台的室外外壳中。



操作指南:适用首次构建独特的 Arduino 项目
在尝试了许多内置可下载的示例,像之前的视频中介绍的那些,然后,你在 Arduino 学习之旅的下一步,就是将示例代码组合起来,制作出你想要的原型。
环境传感器
温度和湿度等环境因素会影响建筑物和电子元器件的使用寿命。暖通和空调 (HVAC) 系统的运行依赖良好的环境数据。
温度传感器
温度传感器 是一种可以测量周围或远处热量并将数据传输到系统的器件。这通常是通过利用材料在受热时如何改变物理和电气特性来实现的。
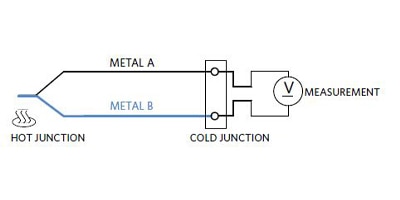
 热电偶 - 具有自供电特性,在很大的温度范围内都能快速响应,成为最常见的温度传感器类型。热电偶的工作原理是一种称为塞贝克 (Seebeck) 效应的物理法则。当两种不同导体材料之间存在温差时,在结合处会产生电压差。这种电压差可以被放大和测量。
热电偶 - 具有自供电特性,在很大的温度范围内都能快速响应,成为最常见的温度传感器类型。热电偶的工作原理是一种称为塞贝克 (Seebeck) 效应的物理法则。当两种不同导体材料之间存在温差时,在结合处会产生电压差。这种电压差可以被放大和测量。
") 电阻温度探测器 (RTD) - 一种简单的温度传感器,用于测量温度变化时金属电阻的变化。RTD 的响应速度通常比热电偶慢,因此不适合快速变化的环境。
电阻温度探测器 (RTD) - 一种简单的温度传感器,用于测量温度变化时金属电阻的变化。RTD 的响应速度通常比热电偶慢,因此不适合快速变化的环境。
 热敏电阻 - 由聚合物或陶瓷材料制成,比热电阻或热电偶更便宜、更容易生产,但稳定性和准确性较低。热敏电阻的输出信号范围通常较大,因此不太需要进行放大和滤波。负温度系数 (NTC) 热敏电阻是最常见、使用最广泛的热敏电阻。使用 NTC 时,设备两端的电阻测量值会随着温度升高而减小。正温度系数 (PTC) 热敏电阻的电阻会随着温度的升高而增大。通常,这种热敏电阻更适用于过温探测等应用中的阈值检测。
热敏电阻 - 由聚合物或陶瓷材料制成,比热电阻或热电偶更便宜、更容易生产,但稳定性和准确性较低。热敏电阻的输出信号范围通常较大,因此不太需要进行放大和滤波。负温度系数 (NTC) 热敏电阻是最常见、使用最广泛的热敏电阻。使用 NTC 时,设备两端的电阻测量值会随着温度升高而减小。正温度系数 (PTC) 热敏电阻的电阻会随着温度的升高而增大。通常,这种热敏电阻更适用于过温探测等应用中的阈值检测。
") 集成电路 (IC) - 设备可以含有多层逻辑,包括数据处理,这有助于这些设备在测量过程中实现更高的线性度。此外,IC 可能在设备中包含阈值监控或警报功能,可减少设计所需的部件数量。
集成电路 (IC) - 设备可以含有多层逻辑,包括数据处理,这有助于这些设备在测量过程中实现更高的线性度。此外,IC 可能在设备中包含阈值监控或警报功能,可减少设计所需的部件数量。

区别各种温度传感器,了解各自的运作原理与设计技巧
温度传感器在电子应用中担任着检测温度的责任,应用范围十分广泛,无论是家中的热水器、微波炉,还是汽车、工业设备,只要是有检测温度的需求,都会用上温度传感器。




温度传感器的类型与设计技巧
温度传感器是一种用来测量环境或物体温度的器件,它们在各种应用中都扮演着重要的角色,从家用电器到工业控制系统都有广泛应用,还可用于工业生产中的负责监控各种设备仪器,实时监测温度的变化。
湿度、湿敏传感器
湿度是对空气中水蒸气含量的测量值。湿度会影响人体健康和机器性能。湿度过高会滋生霉菌。此外,湿度高还会造成腐蚀和电气短路。湿度低会影响人体健康,并增大电子电路的静电放电 (ESD) 概率。湿度可以用相对湿度 (RH) 表示,这是一个百分比,表示在给定温度下,当前水蒸气与发生冷凝前可能存在的水蒸气量的比值。绝对湿度是空气中水蒸气的百分比。
以下是湿度传感器的工作方法:
 电容式 - 通过测量电介质根据周围环境吸水和放水时电容的变化进行工作。这种传感器成本低、维护少,因此成为最常见的湿度传感器类型,但其线性度会随时间变化。测量相对湿度。
电容式 - 通过测量电介质根据周围环境吸水和放水时电容的变化进行工作。这种传感器成本低、维护少,因此成为最常见的湿度传感器类型,但其线性度会随时间变化。测量相对湿度。
 电阻式- 通常有采用非金属层隔开的两个导电材料区域。当非金属层吸收周围空气中的水分时,电阻就会减小,从而使更多的电流在两个导电区域之间流过。测量相对湿度。
电阻式- 通常有采用非金属层隔开的两个导电材料区域。当非金属层吸收周围空气中的水分时,电阻就会减小,从而使更多的电流在两个导电区域之间流过。测量相对湿度。
 热敏电阻式 - 由两个均匀匹配的热敏电阻组成,其中一个暴露在空气中,另一个置于密封容器内。当外露热敏电阻遇到潮湿空气时,其电阻测量值会发生变化。两个热敏电阻之间的电阻差与绝对湿度成正比。
热敏电阻式 - 由两个均匀匹配的热敏电阻组成,其中一个暴露在空气中,另一个置于密封容器内。当外露热敏电阻遇到潮湿空气时,其电阻测量值会发生变化。两个热敏电阻之间的电阻差与绝对湿度成正比。






压力传感器
压力传感器用于检测单位面积内力的存在或变化。可在如水、油或其他化学品等液体或如空气等气体中测量压力。
压力传感器的主要工作方法是测量压电效应产生的电压变化。压电效应是如石英晶体、陶瓷和金属合金等某些物理材料在受到机械应力时产生电荷的一种特性。
在公制和英制测量系统中,有几种测量压力的方法。选择传感器时,应确保最终选择的传感器兼容系统中的其他传感器。
压力单位:
- 帕斯卡:公制计量单位,定义为每平方米 1 牛顿的力
- 巴:个人可能感受到的压力水平,定义为刚好 100,000 帕斯卡,略低于海平面的正常大气压力(1.013 巴)
- 磅每平方英寸 (PSI):对于美国人和英制系统来说更为常见。
压力传感器的类型:
 压力表 - 参照当地标准大气压力测量压力。这些传感器有一个与标准大气压相通的通风孔,作为传感器的测量基准。任何压力测量都只能参照当地条件。
压力表 - 参照当地标准大气压力测量压力。这些传感器有一个与标准大气压相通的通风孔,作为传感器的测量基准。任何压力测量都只能参照当地条件。
 绝对压力- 测量与绝对真空或零压力相关的压力。使用零压真空作为测量基准,无论在什么条件下,使用该基准得到的所有测量值都是相同的的。这样就能在各种工作条件下获得稳定一致的结果。这也使这种传感器成为高度和深度测量的理想选择,包括室内导航。
绝对压力- 测量与绝对真空或零压力相关的压力。使用零压真空作为测量基准,无论在什么条件下,使用该基准得到的所有测量值都是相同的的。这样就能在各种工作条件下获得稳定一致的结果。这也使这种传感器成为高度和深度测量的理想选择,包括室内导航。
 差压- 测量两个独立压力之间的差值,两个压力传感器分别连接至传感器的不同侧。这种压力传感器通常用于需要测量气体或液体流速的系统中,非常有助于探测系统中是否发生堵塞或泄漏。
差压- 测量两个独立压力之间的差值,两个压力传感器分别连接至传感器的不同侧。这种压力传感器通常用于需要测量气体或液体流速的系统中,非常有助于探测系统中是否发生堵塞或泄漏。






气体传感器
气体传感器是一种可以识别不同气态化学物质的设备。通常情况下,这种传感器可检测毒性或爆炸浓度,以防其达到危险水平,但气体传感器最近已被纳入智能家居和楼宇设计中,用于重点关注人体健康和舒适度。
电子气体传感器最常见的目标气体是一氧化碳、二氧化碳、挥发性有机化合物 (VOC)、氧气和氢气。有时,气体传感器会使用更通用术语“空气质量”,这可能包括二氧化碳、VOC 和颗粒物测量,但在这些情况下最好参考规格书。
气体传感器最常见的工作方式基于金属氧化物半导体。其工作原理是将受热的敏电阻器表面暴露在户外,让气体与表面相互作用。当更多的目标气体接触到气体检测层时,表面电阻会发生变化,从而使电路能够检测到周围环境的变化。
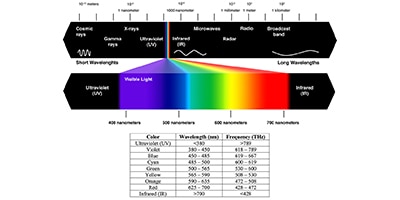
气体传感器发挥作用的另一种方式是非色散红外线 (NDIR)。这种传感器工作时,将一束红外红光射入暴露在大气体中的导管。被吸收的红外光束频率有助于显示目标气体的存在。








方向和存在传感器
这种传感器可用来探测物体、运动并确定系统方向。自动驾驶机器人就是一种使用这种传感器的相关系统,它需要一系列方向和存在传感器来避免碰撞并安全地在工厂车间内行驶。
运动传感器
 加速度计 - 速度(米/秒)是位置的变化率,加速度(米/秒2)是速度的变化率。另一种理解方式是,速度是汽车行驶的速度,加速度用来表示汽车速度变化的快慢。加速度和速度不仅适用于单向行驶的汽车,也适用于转弯(行驶方向变化)的汽车。因此,加速度计是一种可以测量系统振动或加速度的传感器。目前许多加速度计都是 3 轴的,这意味着它们可以测量 X、Y 和 Z 三个维度上的加速度。大多数电子加速度计采用微机电系统 (MEMS),测量压电材料在应力作用下产生的电容或电压变化。
加速度计 - 速度(米/秒)是位置的变化率,加速度(米/秒2)是速度的变化率。另一种理解方式是,速度是汽车行驶的速度,加速度用来表示汽车速度变化的快慢。加速度和速度不仅适用于单向行驶的汽车,也适用于转弯(行驶方向变化)的汽车。因此,加速度计是一种可以测量系统振动或加速度的传感器。目前许多加速度计都是 3 轴的,这意味着它们可以测量 X、Y 和 Z 三个维度上的加速度。大多数电子加速度计采用微机电系统 (MEMS),测量压电材料在应力作用下产生的电容或电压变化。
 光学运动传感器 - 可以利用光(通常是红外线辐射)来探测移动,其中一些传感器还能确定移动的方向。被动红外 (PIR) 传感器可以检测到照射到传感器上的红外光量的变化。这种传感器通常用于安全检测或在有人进入房间时作出响应的自动灯。热电传感器可接收与热有关的红外辐射。热电传感器用于感知火灾,也可用于人体热成像。
光学运动传感器 - 可以利用光(通常是红外线辐射)来探测移动,其中一些传感器还能确定移动的方向。被动红外 (PIR) 传感器可以检测到照射到传感器上的红外光量的变化。这种传感器通常用于安全检测或在有人进入房间时作出响应的自动灯。热电传感器可接收与热有关的红外辐射。热电传感器用于感知火灾,也可用于人体热成像。
 陀螺仪 - 测量旋转变化的装置。陀螺仪可以检测角速度的变化,或以“度每秒”为单位的转动速度变化。这种传感器的目的是提供反馈,以便如飞机等系统确定变化率和平衡。电子陀螺仪采用微机电系统 (MEMS) 检测技术,因其体积小、功耗低、精度高而广受欢迎。
陀螺仪 - 测量旋转变化的装置。陀螺仪可以检测角速度的变化,或以“度每秒”为单位的转动速度变化。这种传感器的目的是提供反馈,以便如飞机等系统确定变化率和平衡。电子陀螺仪采用微机电系统 (MEMS) 检测技术,因其体积小、功耗低、精度高而广受欢迎。
") 惯性测量单元 (IMU) - 可以测量加速度、方向和所有三个运动轴的角度转动速度的电子设备。这些设备基于不同类型传感器的多轴组合,通常在同一封装中包含一个加速计、一个陀螺仪和一个磁力计。
惯性测量单元 (IMU) - 可以测量加速度、方向和所有三个运动轴的角度转动速度的电子设备。这些设备基于不同类型传感器的多轴组合,通常在同一封装中包含一个加速计、一个陀螺仪和一个磁力计。

倾斜传感器用在哪里?如何根据其特性和应用环境选型?
倾斜传感器用于测量物体倾斜角度,在航空航天、楼宇健筑、工业自动化、汽车等领域发挥着重要的作用,以帮助计算重力对物体的影响,确保稳定性和安全性。





光学传感器
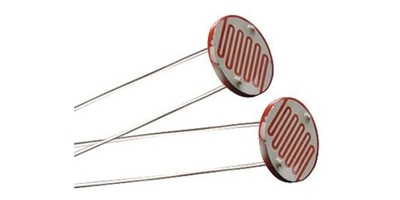
光学传感器又称光电传感器,是利用光学特性探测物体的设备。其他传感器只能探测具有特定金属或导电材料成分的物体,而光学传感器则不同,可以探测塑料、玻璃、木材和金属等多种材料。通常情况下,光学传感器是一种由两个主要部件组成的设备:发射器和接收器,前者通常是 LED,可向某一个方向发射光束;后者是电路中的光电晶体管,可对光的变化做出反应。

 穿透式光束传感器 - 一对相互独立的装置,包括一个光束发射装置和一个光束接收装置。当物体穿过光束时,会中断光路,减弱或阻挡来自接收单元的光束。接收单元的光量变化会触发输出电路。这种传感器的常见应用如车库门开启系统上的安全光束。
穿透式光束传感器 - 一对相互独立的装置,包括一个光束发射装置和一个光束接收装置。当物体穿过光束时,会中断光路,减弱或阻挡来自接收单元的光束。接收单元的光量变化会触发输出电路。这种传感器的常见应用如车库门开启系统上的安全光束。
 来源:
来源: 逆反射传感器 - 类似于穿透式传感器,但其发射器和接收器不在两个独立的单元中,而是在同一个外壳中。发射器元件发出的光线向外投射到反射器上,反射器将光线反射回接收器元件。当有物体穿过光束时,接收器上的光量就会减少。
逆反射传感器 - 类似于穿透式传感器,但其发射器和接收器不在两个独立的单元中,而是在同一个外壳中。发射器元件发出的光线向外投射到反射器上,反射器将光线反射回接收器元件。当有物体穿过光束时,接收器上的光量就会减少。
 来源:
来源: 漫反射传感器 -发射器和接收器在同一个封装中,但与反射传感器不同的是,漫反射传感器是在光从目标物体反射回接收元件时触发的。如果目标物体能将一些光线反射回传感器,传感器就会触发,因此在物体路径和方向方面非常灵活。
漫反射传感器 -发射器和接收器在同一个封装中,但与反射传感器不同的是,漫反射传感器是在光从目标物体反射回接收元件时触发的。如果目标物体能将一些光线反射回传感器,传感器就会触发,因此在物体路径和方向方面非常灵活。
 来源:
来源:


GP2A25J0000F Sharp反射式光学传感器的连接器及其配套部件
SHARP/Socle Technology GP2A25J0000F反射式光学传感器使用的是292133-3,一种3位通孔连接器头。

接近传感器
接近传感器是一种无需实际接触物体就能确定物体存在或距离的设备。有许多不同的工作方法,从检测目标物理性质传感器,到检测环境传感器。
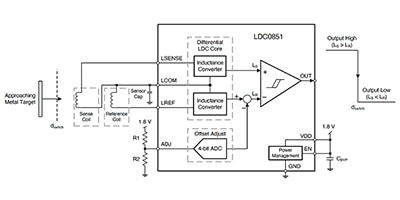
 感性接近传感器- 检测导电(即金属)物体的存在,其检测范围取决于被检测金属的类型。这些传感器工作时,采用极性以高频方式不断变化的磁场。当作为目标物体的导电金属穿过传感器产生的磁场时,其内部会产生涡流。涡流会产生相反的磁场并扰乱传感器磁场,从而触发输出电路。
感性接近传感器- 检测导电(即金属)物体的存在,其检测范围取决于被检测金属的类型。这些传感器工作时,采用极性以高频方式不断变化的磁场。当作为目标物体的导电金属穿过传感器产生的磁场时,其内部会产生涡流。涡流会产生相反的磁场并扰乱传感器磁场,从而触发输出电路。
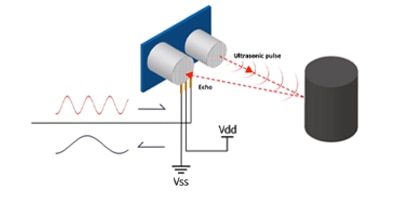
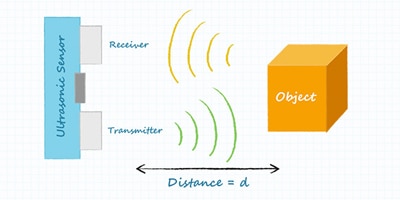
 超声波接近传感器 - 是一种能发出高频声波的传感器,其工作频率高于人类的听觉范围。通过测量反射声波从目标物体弹射回接收传感器的时间,可以确定与目标物体的距离。
超声波接近传感器 - 是一种能发出高频声波的传感器,其工作频率高于人类的听觉范围。通过测量反射声波从目标物体弹射回接收传感器的时间,可以确定与目标物体的距离。
 容性接近传感器- 可以检测粉末、颗粒、液体和固体等形态的金属和非金属目标物体。这种传感器很像感性传感器,但不是测量金属物体的电感特性,而是通过测量电容的变化来工作。检测板作为电容器的一半,目标物体作为另一半,可以检测到电容变化,而电容变化与物理距离或成分有关。
容性接近传感器- 可以检测粉末、颗粒、液体和固体等形态的金属和非金属目标物体。这种传感器很像感性传感器,但不是测量金属物体的电感特性,而是通过测量电容的变化来工作。检测板作为电容器的一半,目标物体作为另一半,可以检测到电容变化,而电容变化与物理距离或成分有关。