问: Microchip 电动两轮车方案,主要使用什么电机控制方案?电机最大转速能达到多少?
答: 兼容各种位置传感器的 FOC 方案,加入 MPTA、弱磁、恒功率、恒转速等多种控制策略,可以进行能量回收利用,扩大续航里程。电机最大转速能达到多少要看开发者选的电机能支持到多少。Microchip 的方案可以支持从 350W 到 6KW 的电机控制需求。
(Q&A 来源于: Microchip 电动两轮车解决方案在线研讨会)
一、电机控制方案原理
电动两轮车解决方案通过先进电机控制、电池管理及充电技术,助力应对续航、寿命、效率等电气化挑战,推动城市交通低碳可持续发展,对减少道路交通碳排放意义重大。
电动自行车(e-Bike)电机控制系统框图
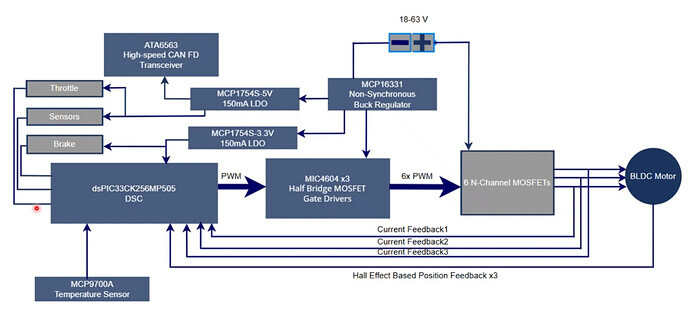
- FOC 方案基础:框图里核心控制单元是
dsPIC33CK256MP505 DSC(数字信号控制器 ),它通过PWM信号输出,经MIC4604 x3 Half Bridge MOSFET Gate Drivers(半桥 MOSFET 栅极驱动器 ),驱动6 N - Channel MOSFETs(功率管 ),最终控制BLDC Motor(无刷直流电机 )。FOC(矢量控制)方案能精准控制电机定子电流矢量,让电机按需求输出转矩、转速,是实现高效控制的核心。 - 兼容位置传感器:框图中有
Hall Effect Based Position Feedback x3(3 路霍尔效应位置反馈 ),代表方案支持霍尔传感器;实际还兼容磁编、电感式等其他位置传感器(如问题中 “兼容各种位置传感器” ),通过不同传感器反馈电机转子位置,配合 FOC 算法,适配多样电机类型与应用场景。
二、控制策略作用
- MTPA(最大转矩电流比):让电机以最小电流输出最大转矩,降低
dsPIC33CK256MP505 DSC控制下的电流损耗,提升能效,对应框图中电流反馈(Current Feedback1/2/3)参与的电流优化逻辑,保障电机高效运行。 - 弱磁、恒功率、恒转速:弱磁扩展电机高速运行范围,恒功率维持电机高功率输出稳定性,恒转速保障特定工况下转速稳定;这些策略通过
dsPIC33CK256MP505 DSC调整PWM输出,协同MIC4604栅极驱动器、6 N - Channel MOSFETs功率管,适配不同负载与速度需求,比如高速骑行时弱磁提升转速,爬坡时恒功率保障动力。 - 能量回收:刹车等工况下,电机进入发电状态,通过
BLDC Motor、6 N - Channel MOSFETs等电路,将能量回充到电池(框图中18 - 63V输入可理解为电池供电,回收能量补充此环节 ),实现续航提升,对应方案 “能量回收利用,扩大续航里程” 的功能。
三、电机转速与功率适配逻辑
- 电机最大转速:电机本身设计(如转子结构、绕组参数 )决定最大转速上限,
dsPIC33CK256MP505 DSC等控制单元是 “调速执行者”,而非转速 “上限决定者”。比如选高转速设计的电机,配合方案控制,可实现更高转速;若电机本身设计转速低,方案也无法突破物理限制,所以说 “看开发者选的电机能支持到多少” 。 - 功率适配(350W - 6KW):方案通过
dsPIC33CK256MP505 DSC算力、MIC4604栅极驱动能力、6 N - Channel MOSFETs功率承载,覆盖从低功率(如电动滑板车 350W )到高功率(如电摩 6KW )需求。不同功率电机,依靠Current Feedback电流监测、MCP16331电源模块(非同步降压调节器 )供电适配,让方案灵活支持多样应用场景。
简单说,方案以 FOC 为核心,借位置传感器反馈、多样控制策略,适配不同电机,实现高效调速与能量管理;电机最大转速由电机自身决定,方案负责 “按需控制”,且能覆盖 350W - 6KW 功率区间,支撑从滑板车到电摩的应用 。
相关产品: