活动小编
1
AI 人工智慧正以惊人的速度重塑世界,我们正逐步走向与 AI 共存的生活型态。从智慧家庭到精准医疗,从智能制造到自动驾驶,AI 技术已深度渗透至社会发展的各个层面,成为推动未来革新的核心力量。
为了帮助您紧跟AI前沿,我们携手DFRobot 重磅推出 4集 精彩视频,每周发布一集,聚焦AI应用实践与发展趋势,欢迎来看视频,从视频获取灵感,参与做任务:在本帖分享你的 AI 项目设计想法,有机会赢取 DFRobot 之选大奖 - 最高 ¥700 京东券回馈。
获奖条件
- 设计中必须包括以下 DFRobot 精选产品至少一款*
- 限原创及从未公开发布的设计
- 每人只限提交一则
- 每个留言不少于 200 字
- 辅助图片和视频数量上限:2 张(每张小于 1MB),可接受的图片类型:jpg、jpeg、gif、heic、heif、stl、tiff、mp4
- AI 项目设计想法描述越仔细越精彩,获奖机会越大!
*获奖者必须于 2025 年 12 月 31 日前在 digikey.cn 人民币官网购买 DFR0992-EN 或 DFR0100 才可获得回馈,回馈金额将会取订单总金额最接近 ¥50 为准,例如订单金额 ¥149,回馈金额即为 ¥150;订单金额 ¥199,回馈金额即为 ¥200,以此类推。只计算一张订单,不接受合并订单。
订单资料请扫码到微信指定页面上传:
此奖项限最多 3 位,更多活动精彩内容和详情:
感谢Digikey与DFRobot推出的AI系列课程,非常前沿,收益很大。收到Gravity离线AI语音模块的启发,想到了常见于报端的汽车坠水,车窗无法打开造成的悲剧。
我的想法是:《基于本地AI的汽车落水逃生》
UNIHIKER K10 AI EDUCATIONAL TOOL,这个行空板有摄像头也可以进行车内外的环境检测,包括车内人员的活动是否异常,是否处于“慌张”状态。开发板的屏幕可以动态输出车辆运行状态信息。
Gravity离线AI语音模块 SEN0539-EN . UNIHIKER K10 AI EDUCATIONAL TOOL 会控制三轴加速度传感器,判断汽车的下落状态,如果是落入水中,结合Gravity离线AI语音模块,重点识别“救命” “开窗” “打开车窗” “砸窗户”等一系列相关的关联词汇,本地AI模块主动的破窗救人。
568-S32K312MINI-EVB-ND,这个主板可以用于AUTOSAR车载系统,主要用于把上述两个模块接入整车网络。
以上三个子模块是本次创意的基本想法。重点是非常时刻进行本地推理,车辆内部的AI决策 - > “砸开”窗口救人。
感谢Digikey X DFRobot联合推出的AI系列活动课程,收益颇丰,同时我也深受启发,可以基于DFRobot的产品完成《基于LLM与MCP的智能管家智能体》项目:
选用器件:
SEN0501 Gravity 五合一环境传感器:作为集成了SHTC3温湿度传感器、BMP280大气压强传感器、VEML7700光照传感器、紫外线传感器共五种环境参数的五合一传感器,可以为最后的LLM决策提供多维度多模态的传感数据,供决策参考。
DFR0975-U 基于ESP32-S3的高性能主控:FireBeetle 2 ESP32-S3-U是一款基于ESP32-S3-WROOM-1U-N16R8模组设计的主控板。ESP32-S3-WROOM-1U-N16R8模组拥有16MB Flash和8MB PSRAM,可以存储更多的代码和数据,模组搭载的ESP32-S3芯片拥有强大的神经网络运算能力和信号处理能力。强大的MCU适合作为项目的核心主控,与下游传感器交互收集环境感知信息,再按规则打包传输给LLM进行决策,并按照决策内容操作相应外设控制家居设备,比如天黑自动拉窗帘开灯、天亮时自动打开窗帘提醒用户起床等。
DFR0768 Fermion DF1201S DFPlayer PRO MP3播放器模块 & FIT0502 无源音箱小喇叭:适合根据用户需求提供语音支持功能以及音乐播放舒缓心情的实现,比如当LLM了解到用户疲惫等情况时,自动播放对应情景音乐。
DFR0706-EN 行空板-M10:搭载彩色触摸屏,适合用户与LLM进行人机交互。
总体上,用户提过屏幕或者语音提出自己需求,然后基于上游API服务或者本地ollama部署的大模型开发的mcp服务,大模型收集到需求后,调用对应的mcp服务,而mcp服务包含获取环境感知数据、操作外设等功能,提过DFR0975-U核心主控进行调度来完成对应功能,从而为用户提供合理、智能的服务,成为一个能揣摩主人心意的智能管家。
硬件板卡:UNIHIKER K10 AI 编程板,具有NFC,超声波,功能齐全。支持Python可以部署MATTER SERVER。
通过人体接近传感器或者板载的超声波传感器来检测儿童是否处在窗户的边缘,如果检测到危险情况,立即紧闭窗口,防止儿童从窗户摔落。
同时借助WIFI,通知家长相关危险情况,从而确保儿童在窗边活动的安全性。
近年来,儿童从高空摔落的报道经常出现,尤其是窗户。借助最新的MATTER技术,打造一个智能安全互联的家居系统,把智能窗户也纳入考虑范围,增加儿童活动的安全性。
date
7
00后小时候想必都应该看过《动物世界》这个节目,小时候一直以为是人扛着摄像机拍下来的。长大后总会有个疑问,离得这么近拍摄,动物它们不会发现人类吗?再到后来,才明白,取代人类拍摄的是一台台微型机器上面附带了一个相机。所以希望通过CM5和SEN0617 BME688 AI环境传感器实现一个用于野生动物研究的红外夜视仪,可以用来监测某种野生动物的数量,了解它们的行为模式。
1.拍摄功能:基于成品红外夜视仪接入CM5,进行红外摄像头拍摄
2.环境数据记录:通过BME688获取环境温湿度、气压数据
3.声音记录功能:通过MEMS麦克风记录周围环境的声音,捕捉动物叫声等自然声音
4.AI物种识别:使用简单灵活的Keraas框架搭建神经网络,采用CNN+GRU层来创建模型,之后对数据集进行训练和测试。自动识别捕捉到的动物种类,并记录数据,同时对采集到的环境数据进行训练,以便了解动物的出现条件和行为模式
5.太阳能供电:太阳能板保证设备在野外能持续运行
6.移动通知与实时数据传输:当检测到动物活动时,系统将发送通知到手机应用,并提供实时视频流
7.远程控制与调整:通过无线网络远程控制设备,调整设置或更新软件
基于 UNIHIKER 行空板 M10 的智能环境监测与 AI 预警系统
硬件选型
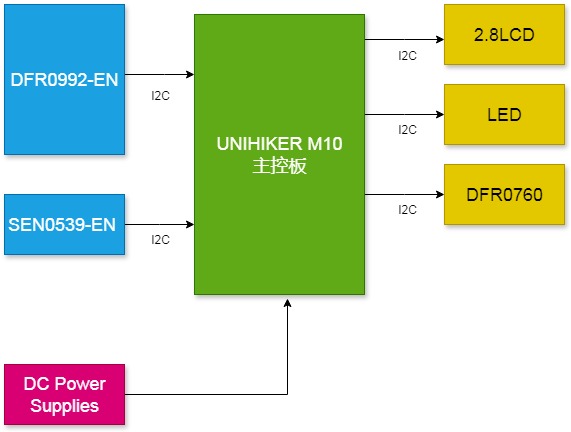
主控采用 UNIHIKER M10(行空板 M10),一款 DFRobot 专为 Python/AI 教学设计的主控板,集成 2.8 寸触摸屏、WiFi/Bluetooth、多传感器接口和 Linux 系统。该板自带温度/湿度传感器作为基础,通过扩展I2C DFR0992-EN(Gravity: I2C 多功能环境传感器) 用于核心 VOC 和气压监测,扩展SEN0539-EN 和DFR0760 Gravity模组进行语音识别与声音反馈。
1 个赞
基于 UNIHIKER 行空板 M10 的智能环境监测与 AI 预警系统
- 项目概述
项目名称:EcoAI Guardian – 基于 UNIHIKER M10 的智能环境 AI 守护者
项目目标:利用 AI 技术结合 UNIHIKER M10 主控板,实现室内/室外环境的实时多模态监测与智能预警,针对空气质量、温度异常和有害气体检测等场景,提供边缘 AI 推理和语音交互反馈。该系统降低 AI 开发门槛,适用于智能家居、教育教学和工业安全。通过 TinyML 实现离线部署,确保低延迟和数据隐私。
创新点:集成 UNIHIKER M10 的 Python 生态和内置 Linux 系统,支持快速原型开发;结合多模态 AI(传感器 + 语音 + 图像),灵感来源于活动视频“扩展感知边界”和“多模态交互”主题,实现环境数据的边缘预测与自然语言反馈。
预期效果:用户通过触摸屏或语音查询环境状态,系统自动推送预警(如“PM2.5 超标,建议通风”),准确率 > 95%。
leihao
10
2.技术方案
AI 框架:在 UNIHIKER M10 的 Linux 环境中运行TinyML轻量级模型。模型训练使用开源数据集(如 Kaggle 空气质量数据集),实现异常分类(正常/高风险)。
传感器与硬件集成:多模态采集,包括环境传感器数据、气体浓度。交互方式,语音识别/合成使用SEN0539-EN 和DFR0760 Gravity模组,进行语音识别与声音反馈,结合 2.8 寸触摸屏显示实时数据。
3.系统架构:
感知层:传感器采集原始数据。
边缘计算层:UNIHIKER M10 运行 AI 模型,进行阈值判断和推理。
交互层:触摸屏/语音提供可视化和自然反馈。
数据层:本地数据库(SQLite),支持简单可视化(Matplotlib 图表)。
xxj
11
基于SEN0305 AI视觉传感器和树莓派的AI垃圾分类解决方案
一、硬件核心配置
SEN0305二哈识图传感器,预装19种视觉算法,支持垃圾图像快速分类(可识别塑料瓶/易拉罐/纸箱等),模块通过UART接口与树莓派5通信(默认波特率9600)。
树莓派5,运行Python+OpenCV实现图像增强处理,部署TensorFlow Lite模型进行二次分类校验,GPIO口驱动舵机。
扩展模块,可增加SEN0617 BME688传感器检测垃圾异味强度,再配合FR0760语音模块实现语音提示功能。
二、系统工作流程
SEN0305实时捕捉垃圾图像,树莓派5校验结果并执行反馈,通过GPIO控制四分类垃圾桶舵机开合垃圾桶,应用第3集视频的多模态技术,结合语音提示增强交互性。
三、测试与优化
投放样品垃圾,查看结果和舵机动作。准确率<80%时,重新习。
优化:在低光环境加补光灯;集成云端(可选,上传数据到DFRobot平台)。