通过引入续流二极管和机械耦合高惯性负载的直流电机,扩展你对H桥的认知。该模型将指导你选择MOSFET开关及编程技术。
什么是 H 桥?
采用四个半导体开关的H桥常用于控制直流有刷电机或单相直流转交流逆变器。当由微控制器正确控制时,H桥可实现直流电机的速度和方向控制。在逆变器中,H桥可产生正弦波信号。
传统H桥电机控制器表现为四个开关中间放置电机的结构。图1中将这些开关标注为S1至S4。电机(M1)位于桥路中央。该结构形似字母H,电机作为横梁,每个垂直臂上各有一个开关。

图 1 :使用MultisimLive构建的H桥机电模型。
H 桥的基本工作原理
基础层面上,H桥通过同时激活两个开关进行控制,如图1所示。例如激活S1和S4会施加正极性电压使电机顺时针旋转。而激活S2和S3则施加反向极性电压使电机逆时针旋转。
这种互补开关模型实用且正确,但并不完备。它未考虑电机机电动力学特性。例如电机绕组具有电感。这会在开关断开时产生电压尖峰。需要二极管D1至D4来换向续流电压以保护半导体开关。同理,电机动能由图1中的飞轮表示。这是必须适应的巨大动能源,若S1至S4操作不当会导致严重电流冲击。可能损坏半导体器件。当电机意外减速时,也可能损坏机械结构。
本工程简报旨在揭示系统的动态特性,重点关注相关电流。这将深化对半导体开关需求及软件控制程序的理解。
本文是一个更大系列的一部分,该系列包含以下列出的文章。前两篇文章尤为重要,因为它们介绍了通常由MOSFET组成的桥臂。图1展示了两条高度简化的桥臂,其中MOSFET及其相关驱动器已被开关替代。然而,体二极管D1至D4被保留下来,因为它们对H桥的工作有重要但常被忽视的影响。
直流电机模型
我们现在将研究直流电机的模型,以增进对H桥的理解。如图2所示,该模型基于带有永磁体的24伏直流Crouzet电机89890911。模型包含三个部分:电枢电阻、电枢电感和与电机转速成正比的反电动势。

图 2 :Crouzet 89890911直流电机的电气模型。
技术提示 :静止时,电机的反电动势为零。如果直接将24伏直流电接入图2的电机,启动电流将被电枢电阻限制在大约35安培。这个基于欧姆定律的计算在电机的数据手册中有所体现。记住,电机的反电动势随速度增加而增大。因此,运行电流远小于启动电流。在空载转速下,反电动势约等于电源电压。
相关说明:假设电机/飞轮组件以全速运转,反电动势约为24伏直流。如果断开电源并短路电机端子,将产生约35安培的电流尖峰。这相当于一种刹车机制,能迅速停止电机。
考虑最坏情况,假设电机全速运转。然后迅速反转极性。此时有0.7欧姆的电枢电阻承受两个电压:24伏直流电源和24伏直流反电动势。这将导致约70安培的电流尖峰,使电机快速制动并反转方向。
注意H桥能够执行本技术提示中描述的每种场景。程序员必须采取主动措施保护半导体开关。
电机仿真
经典直流电机响应如图3所示。在时间索引1秒时电机启动。如图1所示,通过0.7Ω电枢电阻与0.75Ω限流电阻串联,将启动电流限制在约16A。电机需要几秒钟时间带动飞轮加速。电机在第4秒关闭。随后飞轮能量被机械负载耗散,该负载模拟为图1所示的5000Ω电阻。
技术提示 :仿真可能使用电子元件来替代对应的机械部件。本仿真中,飞轮(转动惯量)和机械负载(阻尼器)分别用电容器和电阻器模拟。电容器像飞轮一样储存能量,电阻器像机械负载一样耗散能量。我们可以延伸这个类比,用电感器表示扭转弹簧。
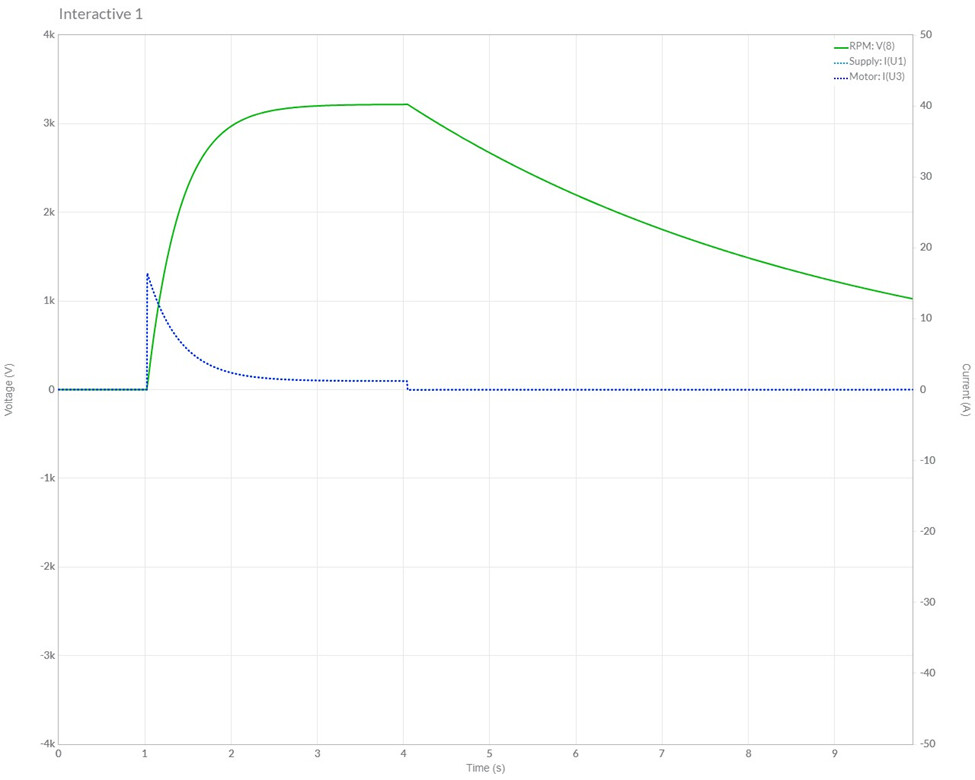
图 3 :配备超大飞轮的直流电机经典阶跃响应。
直流电机与 H 桥的交互。
图4展示了直流电机和H桥的几种工作模式。本图表中T表示秒数,S表示图1中闭合的开关编号。
- T1至T2:S1和S4闭合,产生顺时针加速
- T2至T4:所有开关断开,能量在机械负载中耗散
- T4至T5:S2和S4闭合,随着能量在电机绕组电阻中耗散产生快速减速
- T6至T7:S2和S3闭合,产生逆时针加速
- T7至T9:所有开关断开
- T9至T10:S2和S4闭合,导致快速减速
注意T4和T9时刻的电流尖峰完全取决于电机存储的动能。而T1和T6时刻的尖峰来自24V直流电源。

图 4 :展示H桥开关操作时电机动态运行的曲线图。
技术提示 :图1中有两个保险丝。一根保险丝与电源相连,另一根与电机相连。S1至S4操作不当会导致保险丝熔断。我建议你尝试使用MultisimLive模型进行实验。看看需要什么条件才能熔断每根保险丝。提示:存在两个能量来源。同时避免因激活S1/S2或S3/S4对管而造成直通。
通过二极管进行换向
之前的实验使用了开关S1至S4。到目前为止,我们尚未考虑二极管的作用,仅提到它们能"捕获"电机电感产生的反激电压。此外,前文提及的自举文章中说明二极管是MOSFET的重要组成部分,通常用于直流电机控制。
针对图4,我们本可以使用单个开关产生T4和T9的电流尖峰。例如,考虑T4制动事件发生前的情况。所有开关均断开,电机/飞轮中仍存有大量能量。电机如同电池,正极端子位于顶部。若闭合S2,将通过电机和D4形成完整回路。这个反直觉的电路路径如图5所示。类似电路可用于T9事件,使用S4和D2对管构建。同理,也可为S1和S3开关构建类似电路。例如在T4时刻,我们也可通过激活S3使相应电流流经D1来实现系统制动。所有情况下,单个开关/二极管组合均可实现电机制动。

图 5 :如图4所示,在T4时刻制动电机的反直觉电路。
风险缓解措施
大功率H桥的控制可能颇具挑战性。如本文所述,存在多种可能导致故障的情况。S1/S2或S3/S4对管产生的直通是显而易见的问题。瞬时反转对半导体器件也有损害。技术提示中说明,这款仅3.5磅重的Crouzet电机会产生近70A电流。此外,若电机运行时误触单个开关,可能引发高电流尖峰。
软件缓解措施
这些风险表明必须设置充足的时间延迟,或采用编码器检测轴速后再切换方向。无论采用哪种方法,都需等待系统大部分动能消散后才进行切换。
以图4中T1到T2时隙标识的极性为例。假设S4驱动恒定,S1采用PWM控制。当需要反转电机时,不应立即激活S2/S3开关对。应等待或主动降速,但减速不宜过快,以避免高电流冲击和机械急停。最佳制动方案需监测轴速,并通过S2的PWM实现平稳停止。
硬件缓解措施
选择硬件时需要权衡成本。可选用能承受70A持续电流的MOSFET应对最坏情况。也可选择具备合理余量处理高启动电流的MOSFET。以Nexperia PXN012-100QSJ为例。这款采用小型MLPAK33封装的现代MOSFET可提供50A持续电流和200A/10μs峰值电流。可配置独立电路检测故障状态并关闭系统。
技术提示 :Crouzet电机等可选配机械制动器。通常用于保持轴位固定,例如机器人手臂在电机关闭时保持静止。尽量避免使用机械制动停机,优先采用电气制动方案。
最后的思考
电机驱动系统较为复杂。乍看之下,H桥电路仅含4个"简单"开关似乎并不困难。但加入续流二极管和连接高动能系统的大电流电机后,复杂度骤增。换向错误可能导致大电流。值得注意的是,单个开关误触发就可能引发问题。我们能在硬件层面部分缓解该问题。软件解决方案或许改日再探讨。
敬请期待下一系列文章,我们将通过面包板搭建H桥电路来控制直流电机。
欢迎您提出意见和建议。请把它们留在下面的空白处。
相关信息
请点击以下链接获取相关和有用的信息: