



如何选择并有效地使用振荡器
投稿人:DigiKey 北美编辑
2019-02-12
同步数字系统的出现,令不起眼的振荡器成为基于微处理器的现代数字系统的核心。振荡器的数千种应用创造了极其广泛的振荡器源及配置,并且采用流形谐振器结构。
尽管如此,由于谐振器和内部放大器种类繁多,若干种温度稳定方案也不相同,因此在选择振荡器时往往忽视了对其用途的充分了解。所有这些因素都会影响器件的尺寸、精度、稳定性和成本,以及它们在设计中的应用方式。
本文将帮助设计人员更好地了解振荡器的操作和结构、关键规格,以及如何与设计要求相匹配。
本文同时会探讨输出波形、频率精度和稳定性、相位噪声、抖动、负载和温度变化以及成本,还有如何以最佳方式使用振荡器来获得设计成功。
振荡器基础知识
振荡器是一种电子电路,能够以需要的频率产生周期波形。通用振荡器的功能框图包含一个放大器,以及一个带有频率选择性反馈网络的反馈路径(图 1)。如果回路增益在所需的振荡频率下等于或大于 1,同时回路的相移等于 2p 弧度的倍数,则可以启动并维持振荡。这是一种正反馈条件。
频率相关网络可以是电感电容 (LC) 网络,或是电阻电容 (RC) 网络,但精密振荡器通常需要采用谐振器。谐振器选型是需要处理的规格之一,因为每种谐振器都有自身的优缺点。

图 1:基本振荡器的功能示意图由一个放大器及一个频率选择性网络或谐振器组成(采用正反馈配置)。(图片来源:DigiKey)
常用的谐振器包括石英晶体、表面声波 (SAW) 滤波器或微机电系统 (MEMS)。
当这样的振荡器首次上电时,电路中的唯一信号就是噪声。在满足振荡增益和相位状态的频率下,噪声元素会围绕电路环路循环,而且振幅会因电路的正反馈而逐渐增加。信号振幅会持续增加,直至因放大器特性或外部自动增益控制 (AGC) 单元而受到限制为止。此时可以控制振荡器输出的波形,常见的波形选择包括正弦波、削顶正弦波或逻辑(“0”或“1”)输出。如果选择逻辑输出,则还必须选择逻辑系列(HCMOS、TTL、ECL、LVDS…)。
正弦输出主要用于通信相关应用中的载波和本地振荡器信号生成,在这些应用中频谱纯度是关键考虑因素。正弦波形仅在基本频率下才具有明显功率,在谐波频率下几乎没有功率。
振荡器的关键规格是频率稳定性,该参数定义了振荡器保持频率的程度。相关的规格包括老化率,该参数具体说明了振荡器频率在相当长的时间间隔(通常是一年)内的漂移情况。随着应用速度的提高,振荡器相位的短期变化已经成为一个重要问题。这种短期的相位变化称为振荡器的相位噪声。相位噪声是一种频域规格。等效时域规格包括相位抖动或时间间隔误差。
谐振器
在基本振荡器中,反馈网络可以是几种谐振结构中的任何一种。最常见的是石英晶体。石英晶体谐振器使用压电效应。施加在晶体上的小电压导致晶体变形,而施加在晶体上的力则会产生电荷。这一系列的机电互换形成了非常稳定的振荡器的基础。这种效应会在特定频率下产生振荡,而该频率与晶体类型、切割晶体的几何方向及晶体尺寸有关。
晶体固定在两个电极之间,从而形成晶体谐振器的输入和输出。在这些条件下,晶体就像一个高选择性 LC 电路(图 2)。可以观察到,固定座中的晶体可由一个串联 RLC 电路表示,这表明晶体的串联谐振频率由模型分量 LS 和 CS 控制。并联电容器代表固定座和相关接线的电容。并联电容 CP 与串联电感 LS 反应,产生并联谐振频率。在运行过程中,串联谐振可控制谐振器运行。晶体的基频范围为千赫兹 (kHz) 到约 200 兆赫兹 (MHz)。

图 2:石英晶体的等效电路模型。模型分量 LS 和 CS 可确定串联谐振频率,而 LS、CS 和 CP 用于确定并联谐振。(图片来源:DigiKey)
另一种常用谐振器是表面声波 (SAW) 谐振器(图 3)。

图 3:SAW 滤波器/谐振器使用安装在压电基底上的叉指式换能器,在换能器之间的间隙产生表面声波,从而在输出端产生频率相关的响应。(图片来源:DigiKey)
SAW 滤波器是一种频率选择性器件,该器件使用沿弹性基底表面传播的表面声波。如图所示,利用基底上的导电通路所形成的叉指式换能器 (IDT) 生成并检测 SAW。SAW 滤波器/谐振器的工作频率范围为 10 MHz 至 2 GHz。频率取决于 IDT 元件的尺寸和基板材料的特性。SAW 器件的电路模型与石英晶体的模型相似。SAW 谐振器的制造成本低廉,可使用光刻法在小型封装中制造。这些振荡器称为 SAW 振荡器(简称“SO”)。
本文将要讨论的最后一种谐振器技术是基于微机电系统 (MEMS) 的谐振器。MEMS 采用标准半导体制造工艺来生产微型机械元件。这些器件的尺寸从微米到毫米不等。类似于高频音叉的谐振器设计用于在静电激励下振动。这些谐振器的芯片结构与可编程振荡器/控制器集成电路结合在一起(图 4)。

图 4:MEMS 振荡器模块将 MEMS 机械结构与振荡器/控制器 IC 结合在一个封装内。(图片来源:SiTime)
振荡器/驱动器为 MEMS 结构提供激励,并将其输出馈送至小数 N 分频锁相环 (PLL),并由该锁相环将 MEMS 器件的输出频率乘以可编程因子“N”。一次性可编程 (OTP) 存储器用于存储模块配置参数。温度补偿可通过调节 PLL 内的输出频率来实现。此外,也可对 PLL 进行编程,从而为振荡器提供数字控制的频率输出。
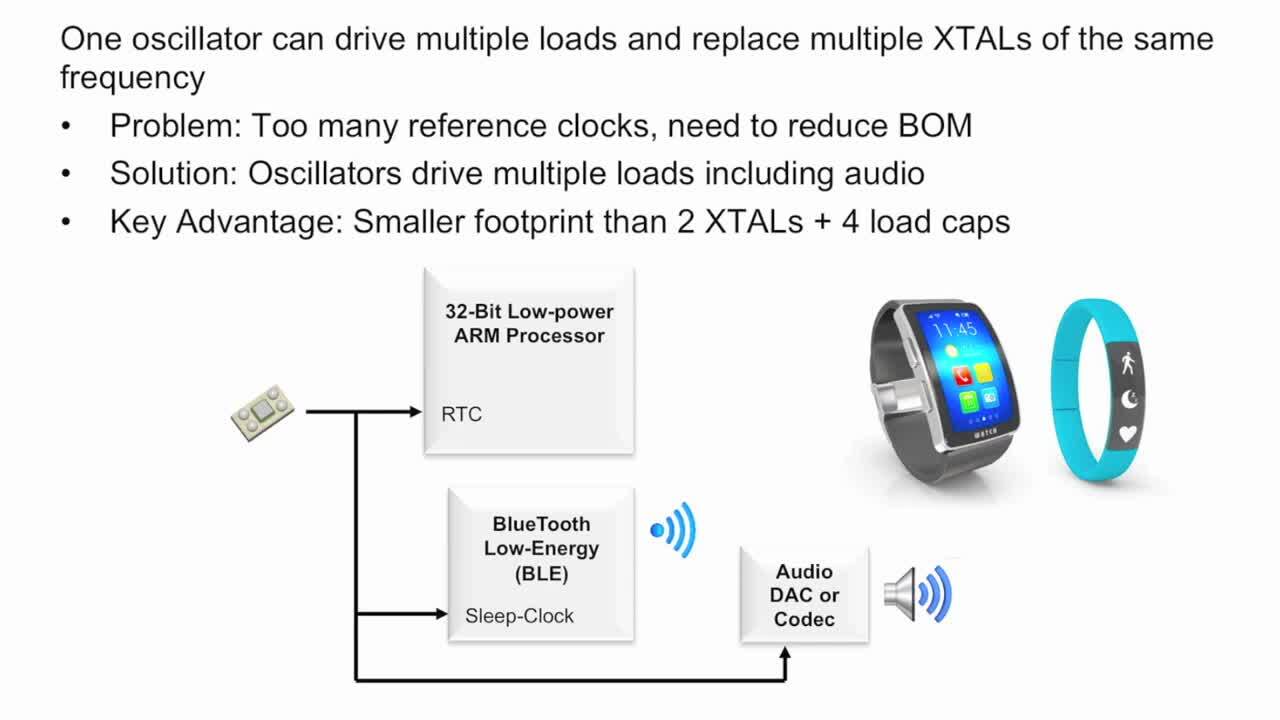
MEMS 振荡器的最大优点是不受机械冲击和振动的影响,此优点是手机、相机和手表等移动应用中的一个重要因素。
振荡器电路类型
模块化振荡器的电路拓扑结构已经发展了数十年,目前有许多可用技术。几乎在所有情况下,电路的改进都是为了提高振荡器输出频率的精度和稳定性。上一段中的示例包括非石英 SAW 和 MEMS 振荡器。应用于石英振荡器的技术也可应用于任何类型的振荡器。这些振荡器工作时的额定负载电容均为 15 皮法 (pF)。负载电容的变化会影响工作频率。
这些拓扑结构的比较均基于裸英晶体振荡器 (XO)(图 5)。此示例是通过使用逻辑门来实现,并且包括变容二极管以允许调整。这些简单的振荡器所呈现的频率稳定性约为 20 - 100 百万分率 (ppm)。

图 5:使用逻辑反相器实现的基本晶体振荡器提供了一种功能,通过与石英晶体串联的变容二极管来控制电压。(图片来源:DigiKey)
Abracon 的 ASV-10.000MHZ-LCS-T 是一种表面贴装晶体时钟振荡器,具有 HCMOS 逻辑电平的数字输出。这种振荡器的主要优点是成本低,其频率稳定性为 ±50 ppm,但该系列振荡器中其他器件的稳定性规格为 20 至 100 ppm。频率漂移的主要来源是温度变化。另一个来源是晶体老化或频率随时间的变化。老化率与基本稳定性成正比。在这种振荡器的情况下,老化率为每年 ±5 ppm。XO 适用于不需要较高的频率稳定性的通用应用,包括微处理器的时钟源等。
温度补偿晶体振荡器(简称“TCXO”)增加了电路元件,以补偿石英谐振器和放大器的温度相关变化(图 6)。

图 6:由于石英谐振器和放大器对温度敏感,因此 TCXO 添加了温度传感器和温度补偿网络来校正频率漂移。(图片来源:DigiKey)
诸如热敏电阻等温度传感器可用于产生校正电压,该校正电压通过适当的网络施加到与晶体串联的可变电压变容二极管,从而实现频率控制。这可通过改变石英晶体的容性负载来执行。温度补偿可以使频率稳定性提高 20 倍或更多。
Abracon 的 ASTX-H12-10.000MHZ-T 是一款典型的 TCXO,具有 HCMOS 输出电平和 ±2 ppm 的频率稳定性规格,其成本大约是基本 XO 的三倍。
另一种稳定温度的方法是将振荡器模块封装在控温箱中(图 7),这种拓扑结构称为箱控型晶体振荡器 (OCXO)。

图 7:通过将振荡器封装在控温箱(温度设为与晶体的频率温度曲线斜率为零时的温度一致)内,OCXO 可使振荡器的温度保持稳定。(图片来源:DigiKey)
晶体振荡器封装在控温箱中。控温箱的温度设为晶体的频率温度曲线斜率为零时的数值,使得细小的温度变化造成的振荡器频率变化极小或没有变化。OCXO 可将振荡器的稳定性提高一千倍以上。这种振荡器适用于需要精确定时的应用,如导航系统或高速串行数据通信。
Connor-Winfield 的 DOC050F-010.0M 是一款具有 LVCMOS 输出电平的 OCXO。这款振荡器具有指定的 ±0.05 ppm 频率稳定性。相对于基本晶体振荡器,在性能得到改进的同时,具有更高的功耗(由于增加了控温箱)、更大的尺寸和更高的成本(约为 XO 的 30 至 40 倍)。
上文讨论的 MEMS 振荡器就是数字控制振荡器 (DCXO) 的示例。
SiTime 的 SIT3907AC-23-18NH-12.000000X 是一款基于 MEMS 的 DCXO,具有 LVCMOS 逻辑输出和 10 ppm 频率稳定性。这款 DCXO 可使用内部 PLL 对频率变化进行编程,其“牵引”范围为 ±25 至 ±1600 ppm。
微电脑控制的晶体振荡器 (MCXO) 具有与 OCXO 相同的频率稳定性,且封装更小,功率要求更低。MCXO 使用两种方法中来稳定其输出频率。第一种方法是让源振荡器以高于所需输出的频率运行,并使用脉冲删除来实现所需的输出频率。第二种方法是以略低于所需输出的频率来运行内部源振荡器,并将内部直接数字合成器 (DDS) 产生的校正频率增加到源输出频率。
IQD Frequency Products 的 LFMCXO064078BULK 是一种兼容 HCMOS 的 MCXO,频率稳定性为 0.05 ppm。该产品系列包括 10 至 50 MHz 之间关键固定频率的振荡器,其物理体积仅为 88 mm3,3.3 V 电压下仅需 10 毫安 (mA) 电流,总功耗为 33 毫瓦 (mW)。
某些应用需要调整振荡器的频率,这一调整可通过数字方式或模拟控制来完成。模拟控制使用压控晶体振荡器 (VCXO) 来完成。图 5 显示了如何通过向与谐振器串联的变容二极管施加电压,并通过改变负载电容来改变其频率的方式来调整振荡器,这是 VCXO 的基本原理。
Integrated Device Technology Inc. 的 XLH53V010.000000I 便是 VCXO 的一个示例,可提供 HCMOS 输出电平和 ±50 ppm 的频率稳定性。VCXO 的牵引范围显示了通过改变控制电压能够实现的最大频率偏移。该振荡器的牵引范围为 ±50 ppm。对于 10 MHz 的标称输出频率,牵引范围为 ±500 Hz。
谐振器部分描述的 SAW 振荡器是另一种具有高可靠性特点的低成本振荡器。EPSON 的 XG-1000CA 100.0000M-EBL3 就是 SO 的一个示例。这些器件可在固定频率应用中使用,例如遥控发射器。它们具有良好的稳定性和抖动规格,但最大的好处是可靠性强。
针对应用选择相符的振荡器
一般而言,将振荡器用作精准时基的应用都需要具有更高频率稳定性的振荡器。因此,GPS 相关应用都非常适合使用基于 OCXO 或 MCXO 的振荡器。如果某个应用需要耐冲击和耐振动,则 SO 振荡器最合适。高速串行接口的时钟需要低时序抖动。成本是所有设计都要考虑的一个因素,通常随所提供的频率稳定性程度而变化。根据所用的技术,其他诸如尺寸或功率要求等因素则取决于器件。这些因素可能需要在工程方面进行权衡。表 1 对本文所讨论振荡器的主要规格进行了比较,以帮助您关注各种振荡器的特性和优势。
|
备注:
- 根据相位噪声计算的估计值
- 启动/稳态
表 1:比较各种振荡器所依据的典型参数。每个参数的选择均依据设计要求和其他因素(如成本和设计时的可获得性)。(表格来源:DigiKey)
表中振荡器的排列顺序是依据频率稳定性。请注意,本文中使用的是特定输出频率,所有这些振荡器的各型号系列均可提供一定范围的输出频率。
结论
充分了解振荡器的结构和操作,可以帮助设计人员集中精力找到合适的振荡器,从而满足其应用需求。设计人员在为设计项目选择振荡器时,总是会涉及工程权衡,其中包括成本、功率、空间、稳定性和准确性;但目前可用的振荡器种类繁多,可通过现成的解决方案来最大限度地减少这些权衡。
免责声明:各个作者和/或论坛参与者在本网站发表的观点、看法和意见不代表 DigiKey 的观点、看法和意见,也不代表 DigiKey 官方政策。




 中国
中国